Robust perception and safety evaluation in highly automated driving
Bachelor’s Thesis, Master’s Thesis, Student Job, Research Project
We are currently looking for motivated students interested in contributing to several research projects in the area of highly automated vehicles including: robustness optimization and evaluation of perception algorithms, environment simulation and collective perception.
Highly automated or autonomous vehicles must be able to perceive their surroundings correctly even under difficult weather conditions. Only with a correct and complete knowledge of its environment an autonomous vehicle is able to plan safe trajectories without harming its environment. Therefore, algorithms and perceptual systems for local and cooperative perception must be investigated and optimized with respect to their robustness against varying environmental conditions.
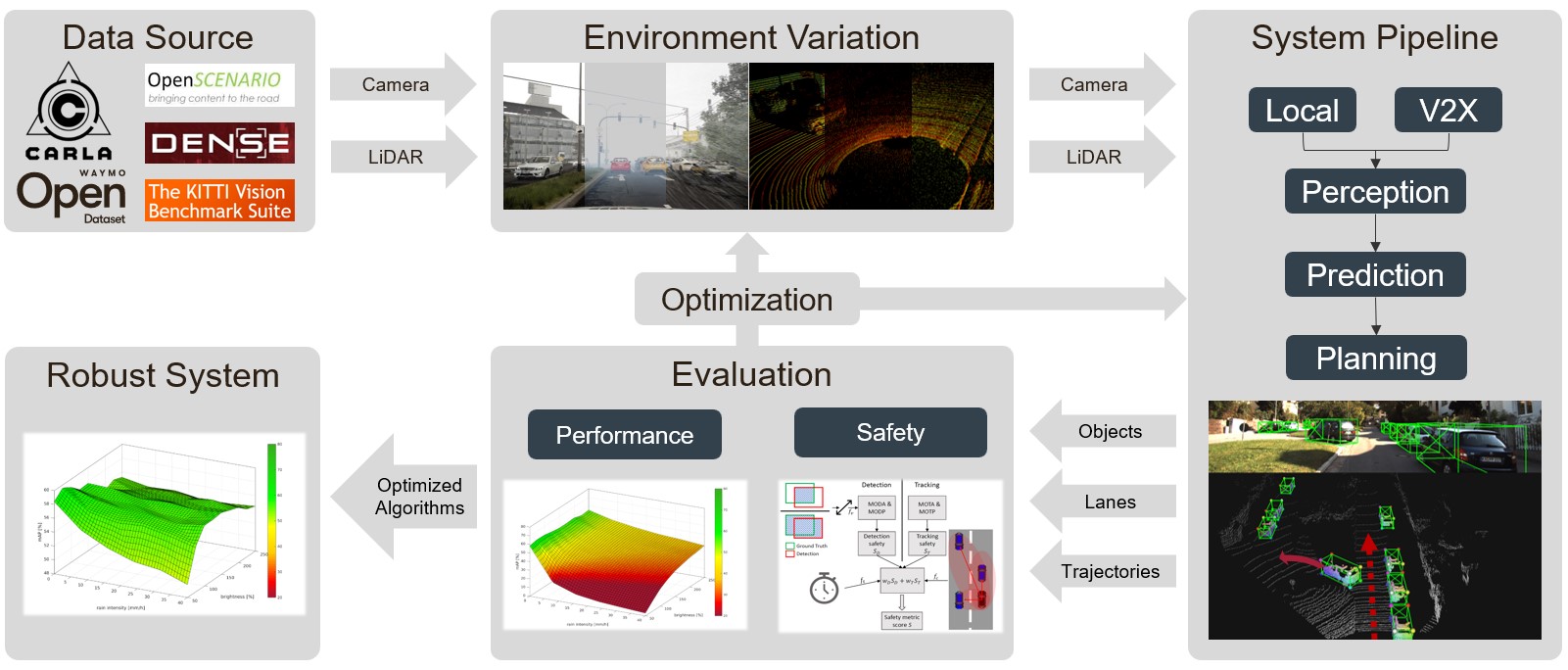
Pipeline for robust perception optimization and evaluation
Example Topics
The following list gives an incomplete overview of topics which can be worked on:
- Investigation and improvement of object detection algorithms for robustness against environmental conditions
- Implementation and evaluation of tracking/prediction algorithms
- Criticality prediction for safety evaluation
- Safety evaluation for perception systems
- Improvement of Lane Detection Algorithms
- Implementation and evaluation of tracking/prediction algorithms
- Extension of Simulation Environments
Your Interests
If you are interested in one of the following topics, this job may well be what you are looking for.
- Automated vehicles
- Virtual environments
- Computer vision
- Modelling & investigation of environmental influences
- Object tracking & fusion algorithms
- Sensor modelling
Your Profile
Basic Skills (topic dependent):
- C++
- Python/Pytorch
- Linux
Most importantly, you should be interested in one of the listed topics!